Your cart is currently empty!
Sale!
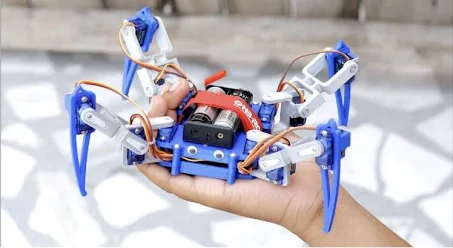
3D-Printed Spider Robot Kit – Screw Assembly Only
Original price was: ₹999.00.₹699.00Current price is: ₹699.00.
🔹 Product OverviewThe 3D-Printed Spider Robot Kit is a DIY robotics kit designed for robotics enthusiasts, students, and makers who want to build their own walking quadruped robot using only screw-assembled 3D-printed parts. This kit allows for easy assembly without the need for soldering or gluing, making it ideal for STEM education, Arduino projects, and AI automation experiments.
Description
Key Features
✔ 3D-Printed Parts – High-quality 3D-printed components for a precise and sturdy structure
✔ Screw Assembly Only – No glue or soldering required, making it beginner-friendly
✔ Customizable Design – Modify and enhance with additional 3D-printed upgrades
✔ Arduino & Raspberry Pi Compatible – Programmable for AI-driven automation & remote control
✔ Durable & Lightweight – Designed for stability, flexibility, and smooth movement
🔹 Technical Specifications
- Leg Configuration: 4-legged spider-like movement
- Material: 3D-printed PLA/ABS plastic
- Assembly Method: Screw-only assembly (no glue/soldering)
- Control System: Arduino, Raspberry Pi, or other microcontrollers
- Actuators: Servo motors for leg movement
- Connectivity: Bluetooth, WiFi, or IR remote control options
- Power Supply: Rechargeable Li-ion battery pack
🔹 Package Includes
✅ 1x Set of 3D-Printed Spider Robot Parts
✅ 4x Servo Motors
✅ 1x Control Board (Arduino-compatible)
✅ 1x Battery Pack
✅ 1x Wireless Module (Optional)
✅ 1x Screw & Fastener Set
✅ 1x Assembly Guide
🔹 Applications
🔹 DIY Robotics & STEM Learning
🔹 AI & Machine Learning Research
🔹 Autonomous Quadruped Robotics
🔹 Arduino & Raspberry Pi-Based Robotics Projects
🔹 Wireless Remote-Controlled Robot Experiments
✨ Build, program, and experiment with your custom 3D-printed spider robot! 🚀
Reviews
There are no reviews yet.